InTDS ArchivebyGuillaume CrabéOptimal Control for Robotics: Part 1How to move industrial robotic arms as fast as possible.Sep 18, 2021Sep 18, 2021
Markus BuchholzGravitational Search Algorithm for Robot Path Planner in C++The Gravitational Search Algorithm is the optimization method inspired by Newton's physic theory and his classical formulation of…Dec 6, 2022Dec 6, 2022
Jegathesan ShanmugamBehavior Trees for ROS2 — Part 1: Unlocking Advanced Robotic Decision-Making and ControlIn the complex and fascinating world of robotics, Behavior Trees (BTs) have emerged as an integral part of decision-making processes.May 14, 20232May 14, 20232
InGeek CulturebySebastianRobot Operating System: How to Model Point Cloud Data in ROS2The simulation of RADU in RViz and Gazebo is progressing well. In the last articles, we learned how to launch the robot and operate it with…Jan 17, 2022Jan 17, 2022
Jegathesan ShanmugamROS2 from the Ground Up: Part 1 — An Introduction to the Robot Operating SystemROS2, the robot’s friend, A platform on which they depend, For communication, coordination, and control, It helps them achieve their goals.Dec 22, 20223Dec 22, 20223
InGeek CulturebyMarkus BuchholzDynamics Modelling and Simulation of Self-balancing Robot in C++The following article displays a common approach to developing a dynamic model of the robot and control system. The article will focus on a…Oct 25, 20222Oct 25, 20222
Shahrullohon LutfillohonovVisual Perception for Self-Driving Cars!Learn concepts by coding! Explore how deep learning and computer vision are used for different visual tasks in autonomous driving.Aug 1, 20223Aug 1, 20223
InGadget FlowbyGadget FlowThe coolest robots you can buy for your home and family in 2022Looking to add some robotic help to your home? Whether they clean your floors or enthrall your kids, these cool robots are fun to work with…May 24, 2022May 24, 2022
InTDS ArchivebyDebby NirwanParticle Filter Localization with Webots and ROS2Helping robot localizes itself in a map with Monte Carlo approach — the Particle Filter Localization.Sep 6, 2021Sep 6, 2021
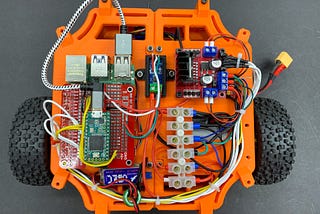
InExploring ROS RoboticsbyJason BowlingBuilding the ROS Robot: Chassis, Wiring, and SafetyBuild it right, fix it less laterFeb 9, 20221Feb 9, 20221
Sharad MaheshwariBuilding a ROS2 Project — Part 0This series is about learning how to design, set up, and maintain a robotics project using ROS2, Docker, and Github. Pre-requisites —…Feb 6, 2022Feb 6, 2022
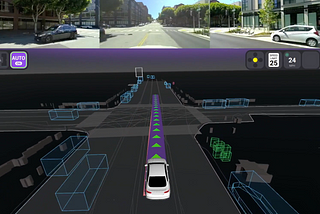
InWoven Planet Level 5byWoven Planet Level 5Deploying a Machine-Learned Planner for Autonomous Vehicles in San FranciscoBy Moritz Niendorf, Senior Engineering Manager; and Alan Agon, Product ManagerNov 4, 2021Nov 4, 2021
InGeek CulturebyMarkus BuchholzRobot Path Planning. RRT Algorithm.Following blog can be considered as the continuity of my previous post ,where I presented the core principles of autonomous robot movement…Oct 20, 20211Oct 20, 20211
Víctor Mayoral VilchesAccelerated robot training through simulation in the cloud with ROS and GazeboIntroducing the robot_gym frameworkSep 4, 20181Sep 4, 20181
Jannik ZürnRobot localization with Kalman-Filters and landmarksMeet ‘Robby’. Robby is a robot. Well technically he is a simplistic virtual model of a robot, but that should be fine for our purpose…Sep 17, 20181Sep 17, 20181
InTDS ArchivebySharath SrinivasanParticle Filter : A hero in the world of Non-Linearity and Non-GaussianThe superiority of particle filter technology in nonlinear and non-Gaussian systems determines its wide range of applications. In addition…Aug 14, 20195Aug 14, 20195
Ronnypetson Souza da SilvaPerception in Robotics: Localization and Mapping (Part I)Visual Simultaneous Localization and Mapping (VSLAM) and Visual Odometry (VO) are very related problems in the perception phase of the…Aug 28, 2021Aug 28, 2021
InSoftware Architecture FoundationsbyHuseyin KutlucaRobot Operating System 2 (ROS 2) ArchitectureRobot Operating System (ROS) is a set of open source algorithms, hardware driver software and tools developed to develop robot control…Dec 6, 2020Dec 6, 2020